网站分类
搜索
最新留言
文章归档
友情链接
何雄奎教授团队:激光除草机器人关键技术与展望(《智慧农业(中英文)》2025年第2期)
引用格式:
余忠义, 王洪宇, 何雄奎, 赵磊, 王媛媛, 孙海. 激光除草机器人关键技术与展望. 智慧农业(中英文), 2025, 7(2): 132-145.
DOI: 10.12133/j.smartag.SA202410031
YU Zhongyi, WANG Hongyu, HE Xiongkui, ZHAO Lei, WANG Yuanyuan, SUN Hai. Key Technologies and Prospects of Laser Weeding Robots. Smart Agriculture, 2025, 7(2): 132-145.
DOI: 10.12133/j.smartag.SA202410031
官网全文免费阅读
知网阅读

激光除草机器人关键技术与展望
余忠义1, 王洪宇2, 何雄奎1*, 赵磊2, 王媛媛2, 孙海2*
(1.中国农业大学 理学院,北京100193,中国; 2.北京市植物保护站,北京 100029,中国)
摘要:
[目的/意义]农田草害制约着作物种植生产的质量和产量,激光除草技术作为一种生态环保防控田间杂草革新方法,具有环保、高效、灵活和自动化特点,可以很好地减少人力需求,降低化学药剂用量和污染,极大地缓解农田劳动力短缺、作物减产压力,在生态环境保护方面具有重要意义。
[进展]首先介绍了激光除草技术的研究背景,概述了激光除草技术体系和作业系统,围绕激光除草机器人关键技术展开论述和讨论,涵盖杂草自动识别定位技术、机器人导航与路径规划、除草执行机构控制技术,以及整机研制等进展。最后结合国内外激光除草机器人的发展现状,综述了激光除草机器人发展目前存在的问题及未来趋势。
[结论/展望]激光除草属于精密的智能化除草方式,是目前国内外学者研究和开发智慧农业关键技术和装备的研究热点,并取得了一系列成果,促进了除草机器人田间实际应用和推广示范。结合不同地区田间草害,未来还应开展大量的激光除草室内外杂草实验研究,以进一步验证激光田间除草的技术可行性并获取准确的激光能耗、效率和效益等数据,为激光除草的装备技术研发与应用提供支持。
关键词: 激光除草;技术原理;智能系统;识别定位;执行控制;激光除草机器人
文章图片
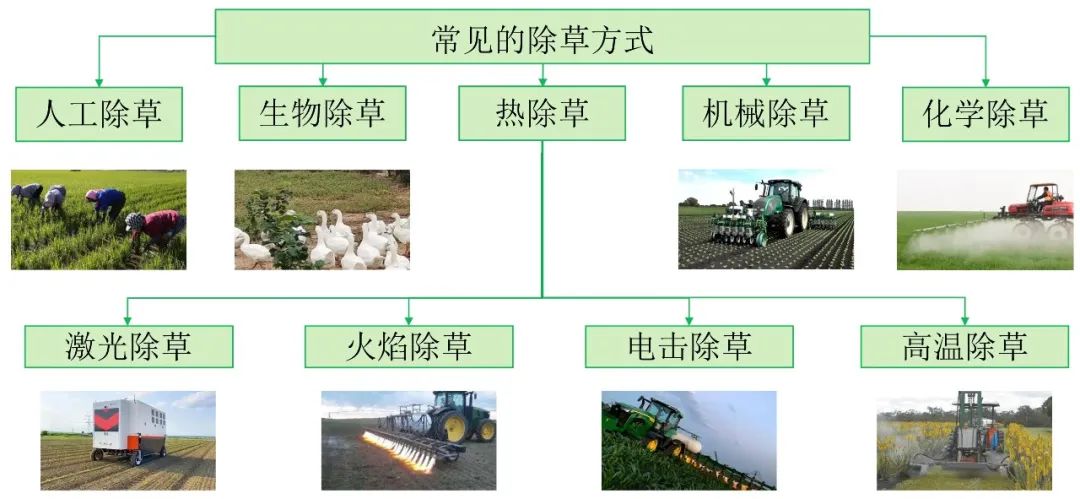
图1 常见的除草方式
Fig. 1 Common used weed control methods
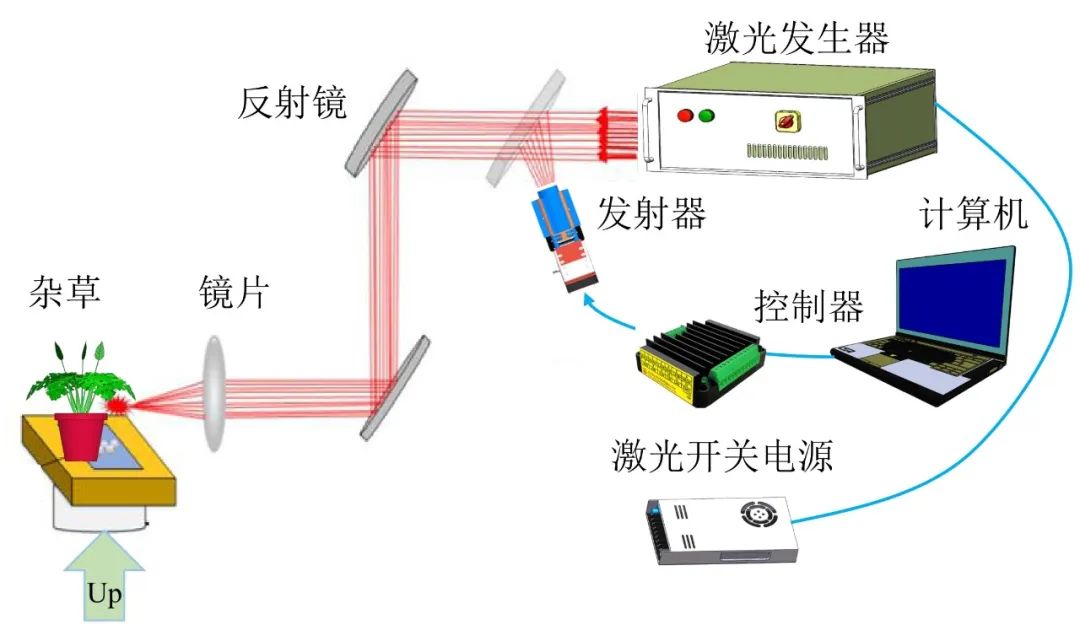
图2 激光除草的作业原理
Fig. 2 The working principle of laser weeding

图3 激光除草关键技术和装备
Fig. 3 Key technologies and equipment for laser weeding
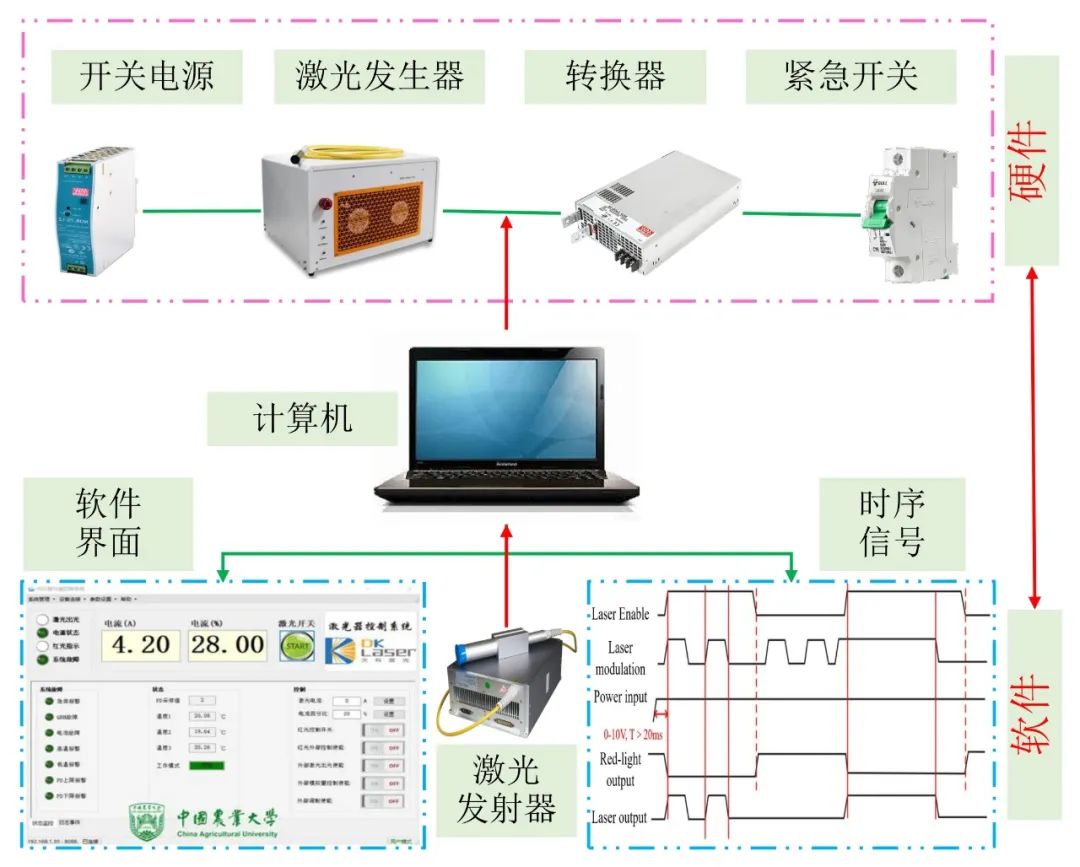
图4 激光除草作业系统
Fig. 4 Laser weeding working system
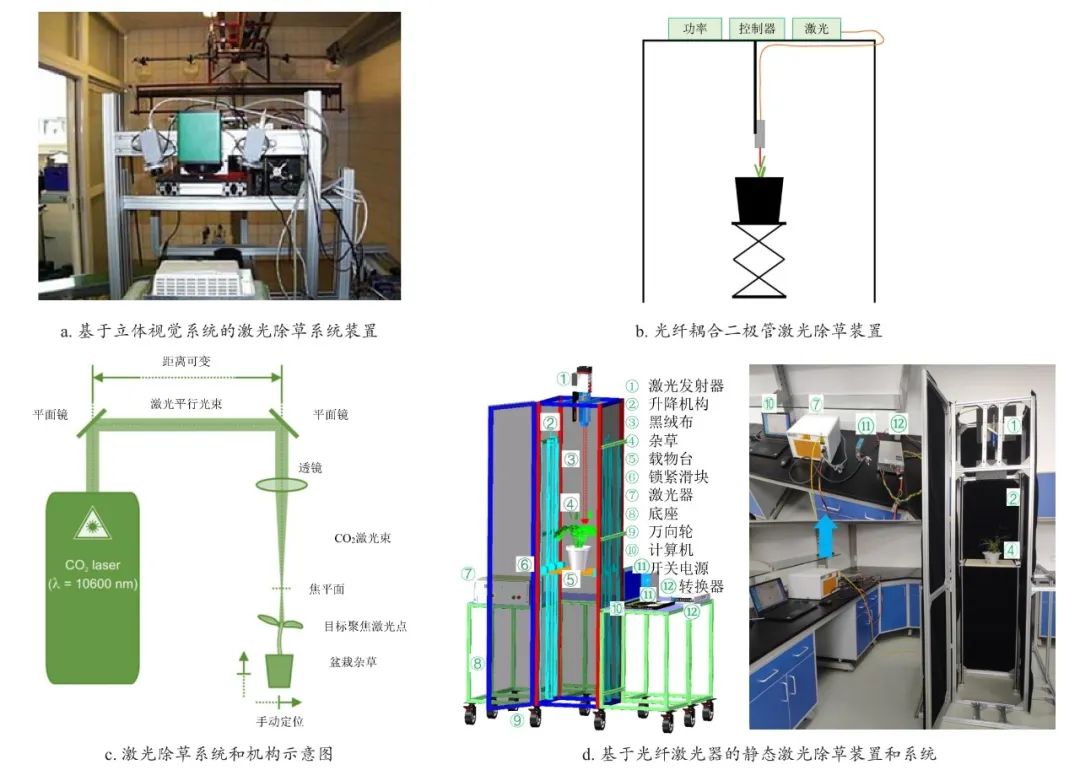
图5 新型激光除草系统装置
Fig. 5 New laser weeding system device
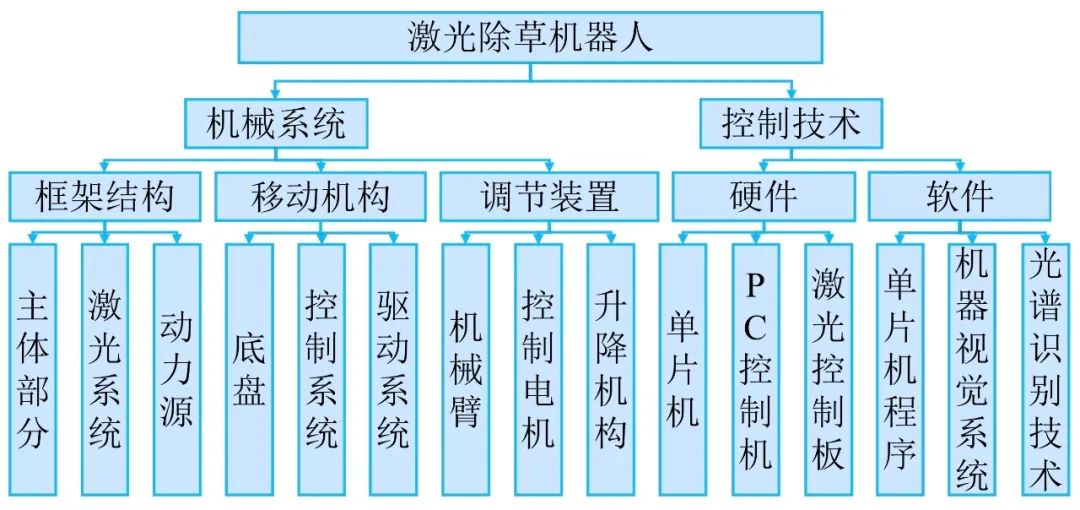
图6 激光除草机器人结构设计
Fig. 6 Structural design of laser weeding robot
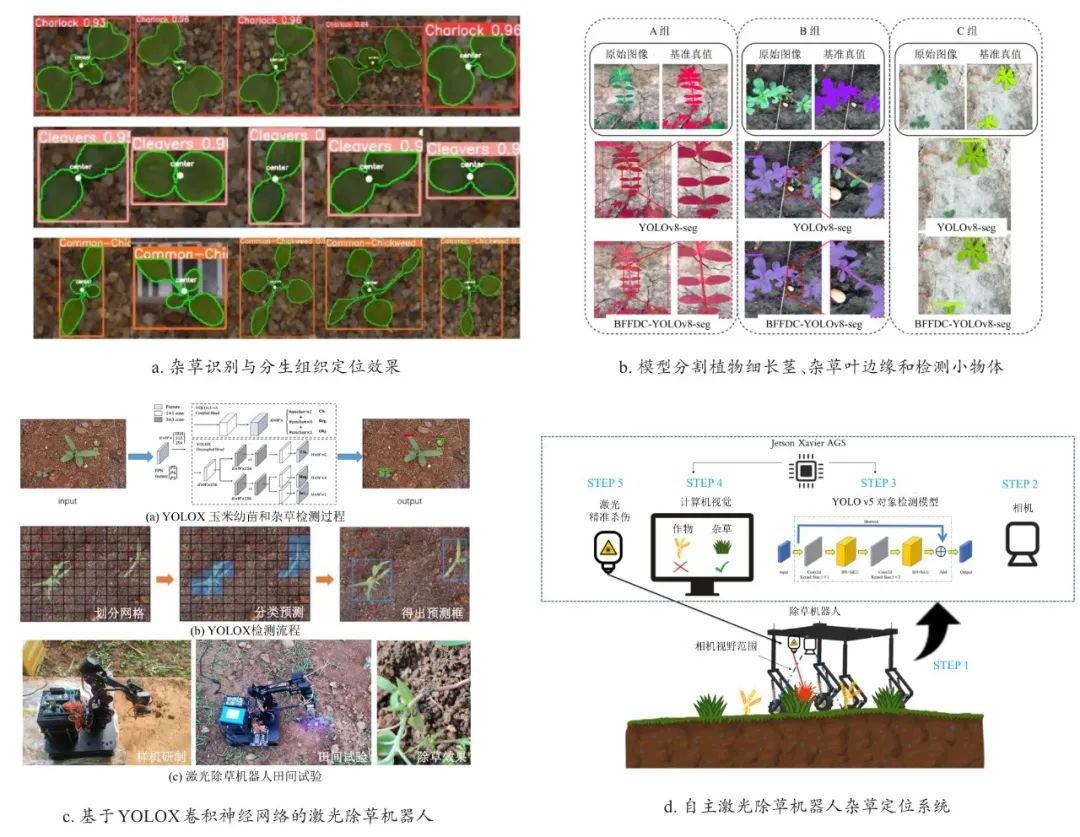
图7 田间杂草识别主要技术
Fig. 7 Main techniques for identifying weeds in the field
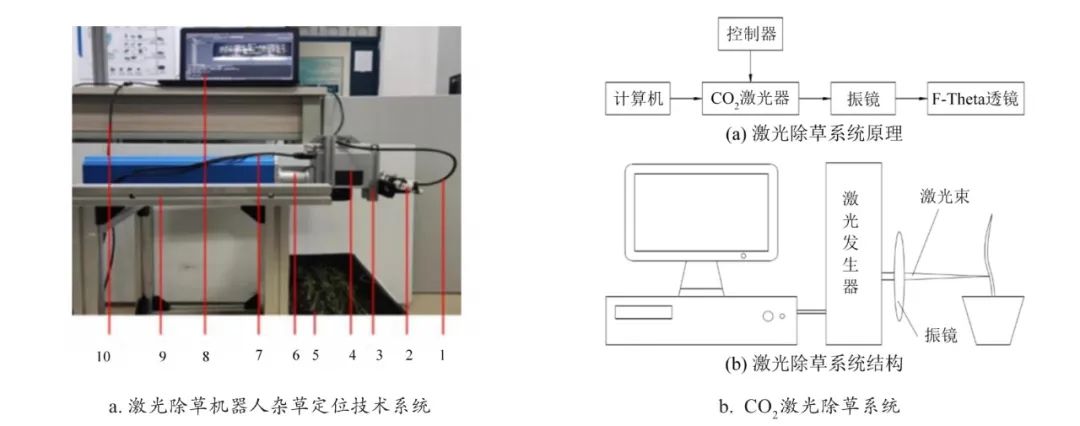
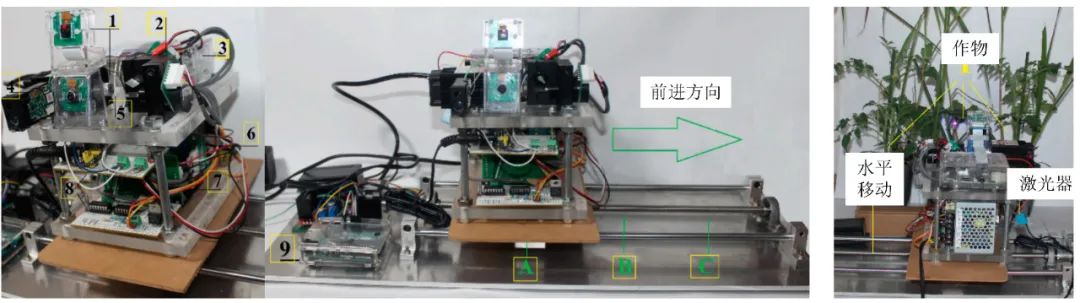
注:1. 双目相机数据线;2. 双目相机;3. 相机支架;4. 激光振镜;5. 培养箱;6. 振镜连接光路;7. DB25激光振镜控制线;8. 计算机;9. 振镜支架;10. 激光振镜数据线。
图8 激光除草机器人杂草定位技术系统
Fig. 8 Weed localization technology system of Laser weeding robot
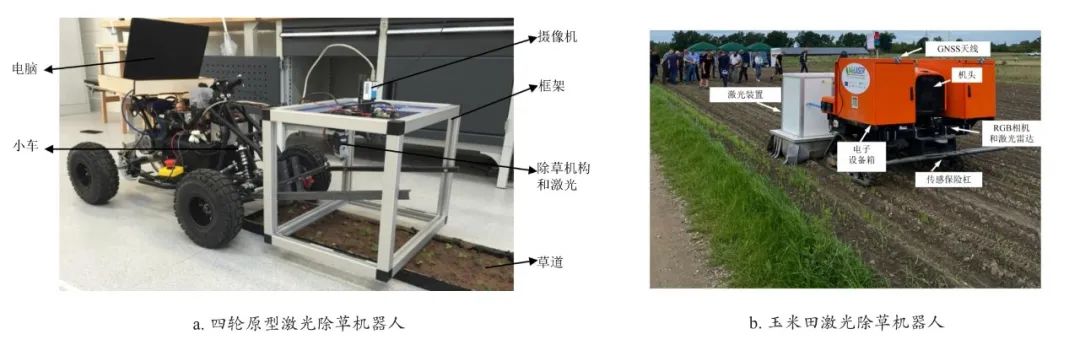
图9 典型激光除草机器人的导航与路径规划
Fig. 9 Navigation and path planning for a typical laser weeding robot
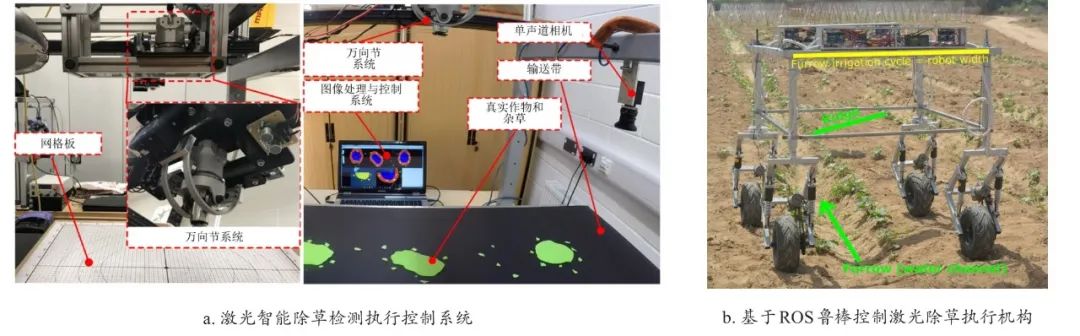
图10 激光除草机器人执行结构系统
Fig. 10 Structural system of laser weeding robot
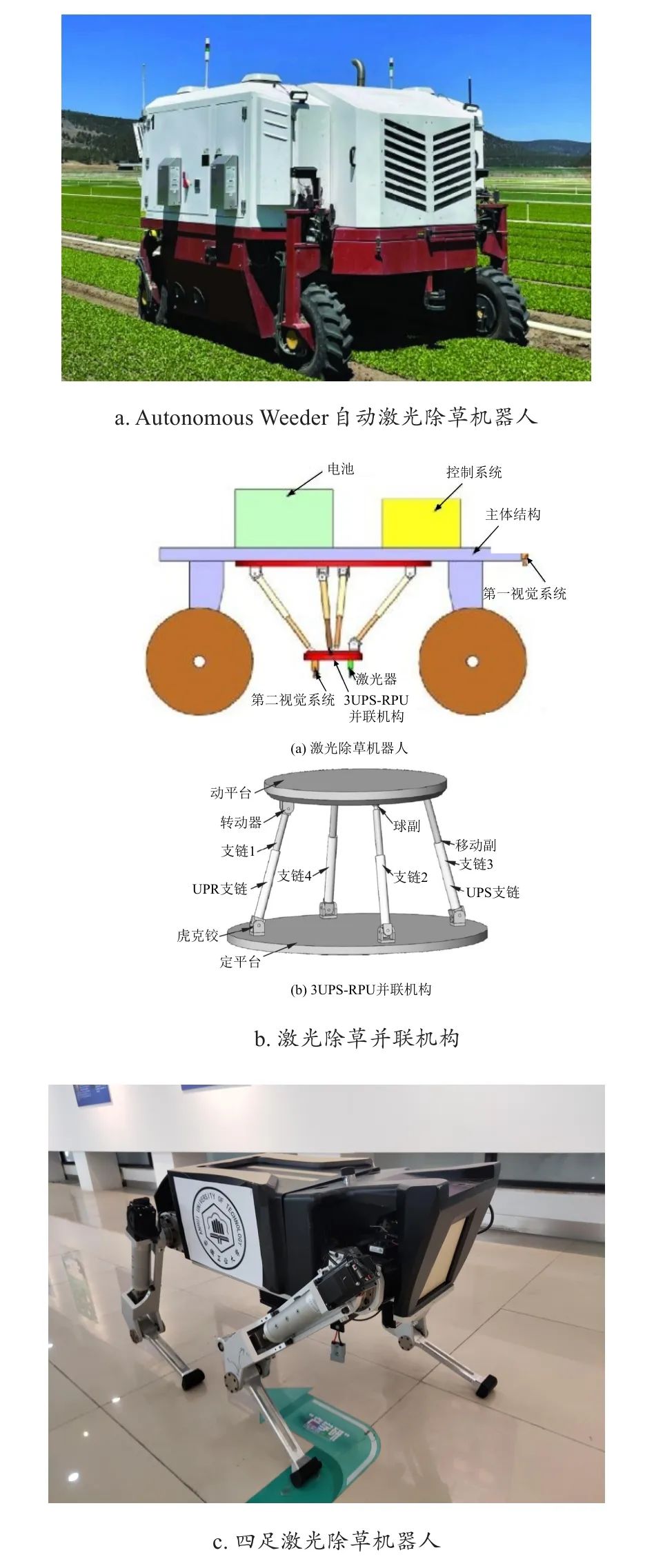
图11 典型激光除草机器人
Fig. 11 Typical laser weeding robot
注:1. 相机;2. 电流计;3. 计算机;4. 激光测距仪;5. 激光;6. 电源;7. 电机驱动器;8. 电子信号处理板;9. 激光装置位置控制器;A、B和C显示了作物的位置。
图12 激光除草装置结构与试验图
Fig. 12 Structure and experimental diagram of laser weeding device
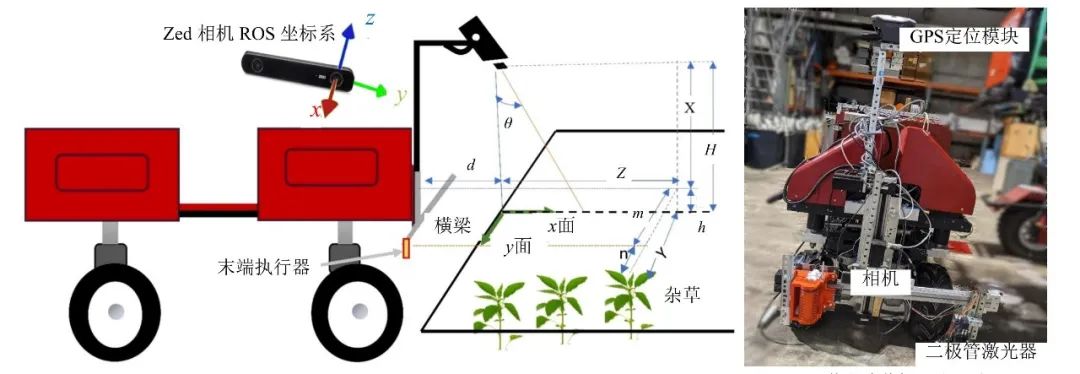
图13 基于深度学习的二极管激光除草机器人
Fig. 13 A diode laser weeding robot based on deep learning
作者介绍

何雄奎 教授
何雄奎,博士,中国农业大学领军教授,博士生导师。现任中国农业大学农业无人机系统研究院院长、《智慧农业(中英文)》编委、国家梨产业技术体系机械化研究室主任、梨树体管理机械岗位科学家、农业农村部农药减量施药技术专家组专家、农业农村部农机创新专家组专家、国际标准委员会ISO/TC 23/SC 6委员、中国国家标准化技术委员会SAC 6委员,入选国家新世纪人才、国务院特殊贡献专家。长期从事农业机械化工程、药械与施药技术的教学与科研工作:重点研究智慧农业技术与农业无人装备系统、智能植保装备与精准变量喷雾技术研发应用、农药施药技术基础理论、农药雾滴雾化沉积飘失规律、精准变量施药与减量施药技术等,先后主持30余项国家级研究项目。至今已培养博士研究生31人、硕士研究生38人,博士后5人。获省部级科技进步一等奖2项(排名均第一)、二等奖2项,已获国家发明专利56项,近年来以第一作者和通讯作者发表SCI/EI论文85篇,出版专著11部。

余忠义 在读博士
余忠义,中国农业大学2023级在读博士生,硕博期间主持研究生项目2项,参与国省市级项目8项,发表学术论文7篇,其中一作SCI/EI论文4篇,授权国家专利15项,一作7项,登记国家软著4项,获得优秀研究生、优秀团员等诸多称号,主要从事数智农业装备研发与智慧植保技术系统研究。
来源:《智慧农业(中英文)》2025年第2期