网站分类
搜索
最新留言
文章归档
友情链接
激光传感器 | 从零开始认识各种传感器【硬禾器件小百科 第二十一期】
@ 各位电子信息爱好者们
硬禾器件小百科 | 传感器系列,第二十期来啦!
今天我们来学习激光传感器,将为大家介绍传感器的工作原理;常见种类;如何查找和购买,以及通过MCU实际演示对于传感器数据的读取过程。
1、什么是激光传感器
激光传感器是一种利用激光技术来进行测量和检测的设备。这类传感器使用激光光束来探测目标物体的位置、距离、速度或其他特性。激光传感器具有精度高、测量距离长,抗干扰能力强的特点。
2、激光传感器是如何工作的
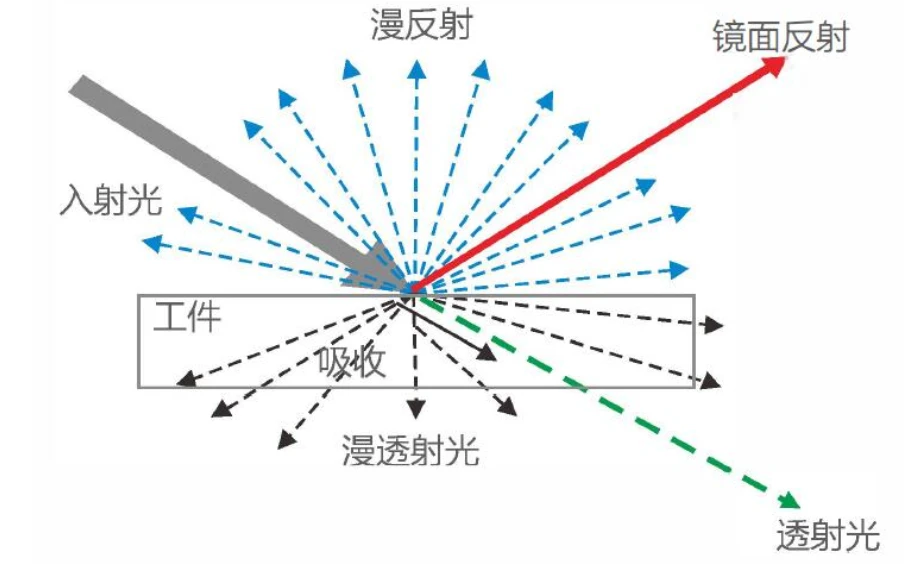
激光传感器的工作原理主要依赖于激光光束与目标物体的相互作用,如反射、散射或吸收。具体的工作原理依据不同类型的激光传感器会有所不同。
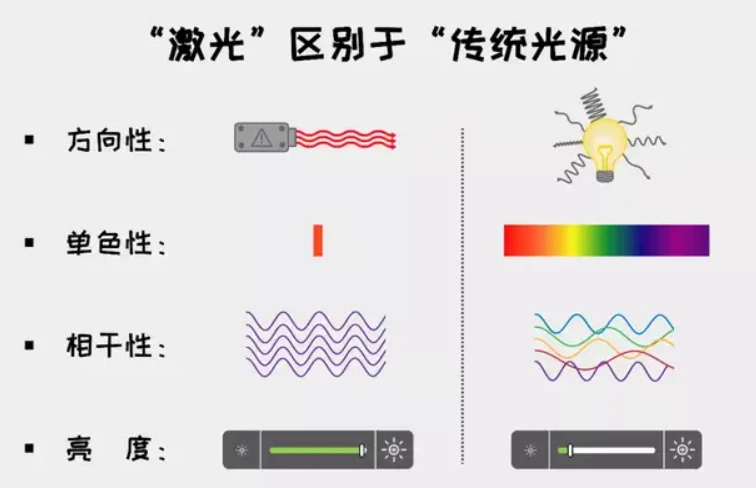
区别于传统光源,激光具有高方向性,在几公里范围内的扩散也只有几厘米。他还具有高单色性,其频宽比普通光小十倍以上,激光束还具有高相干性和高亮度的特性,这是都是激光传感器的优势。
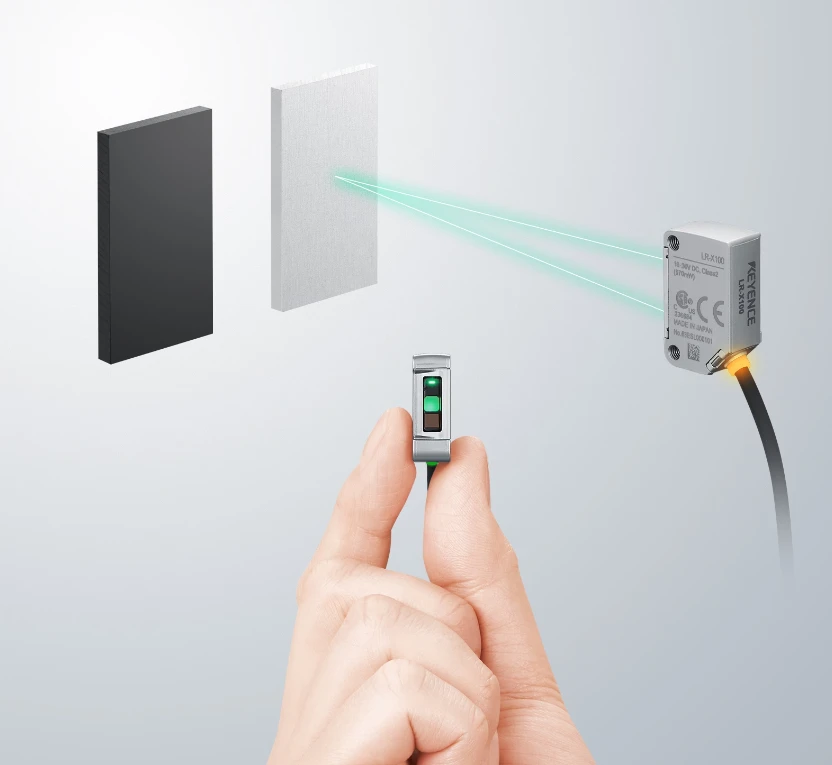
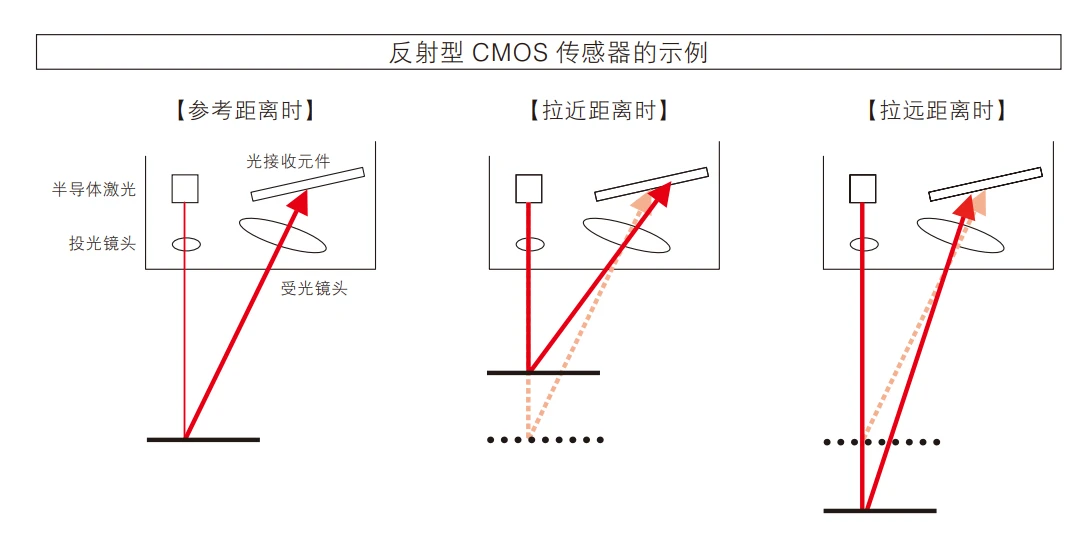
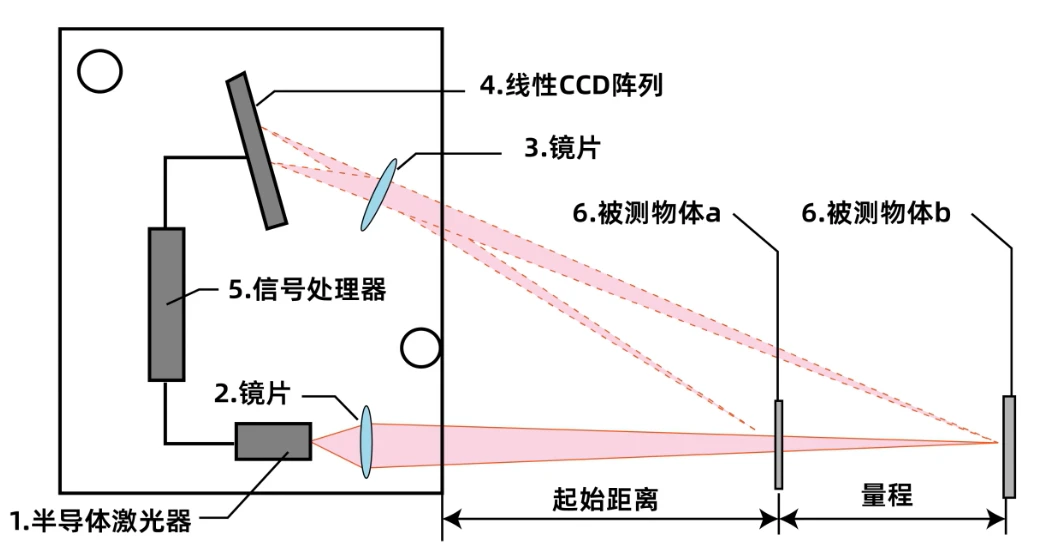
对于测量距离和移动,常用的测量方式是三角测量式:通过半导体激光将激光照射到目标物上,目标物的反射光会在受光镜头上聚焦,并成像在光接收元件上;距离一旦变动,聚焦的反射光角度也会改变,光接收元件上的成像位置也随之发生变化。由于该光接收元件上的成像位置变化随目标物的移动量而变化,因此可通过读取成像位置的变化量来测量目标物的移动量。
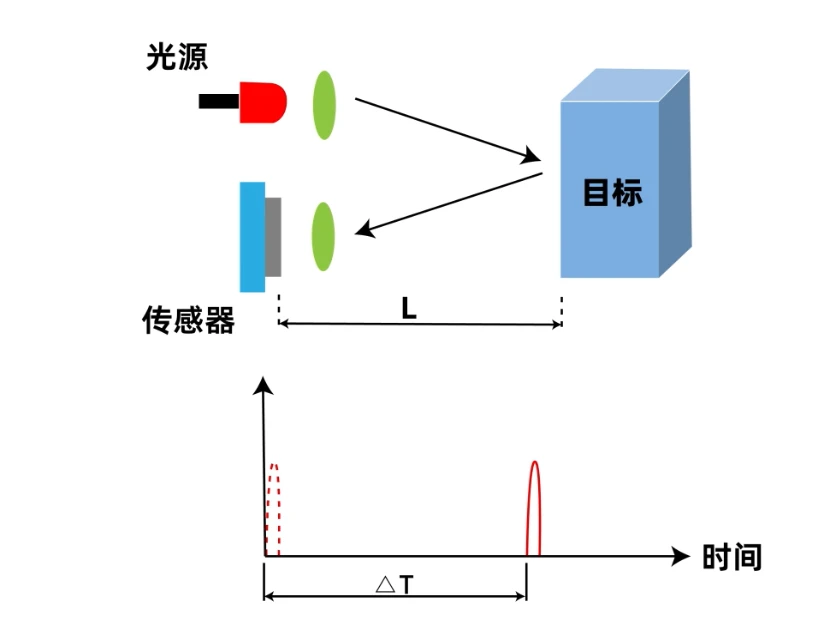
还有一种测量方式是时间测量式:它是通过测量激光从物体上反射回来所需的时间(TOF,即Time of Flight,飞行时间)来进行物体的定位和测量。当激光从物体上反射回传感器后,根据光的发射与反射的时间差,就可以计算出传感器与测量物体之间的距离。
3、常见的激光传感器的种类
激光传感器按照应用,可以分为激光测长,激光测距,激光测速几个种类。
3.1测长激光传感器

现代激光长度计量多是利用光波的干涉现象来进行的,其精度主要取决于光的单色性的好坏。激光是最理想的光源,它比以往最好的单色光源(氪-86灯)还纯10万倍。因此激光测长的量程大、精度高。最大量程可达几十公里。在测量数米之内的长度时精度可达0.1微米。
3.2测距激光传感器

对于较短的距离测量一般采用激光三角测距法,激光束以一定的入射角度照射被测目标,激光在目标表面发生反射和散射,在另一角度利用透镜对反射激光汇聚成像,光斑成像在CCD位置传感器上。由于入射光和反射光构成一个三角形,运用几何三角定理就可以算出测量的距离。
对于较长的距离测量多采用脉冲式激光测距,它是针对激光的飞行时间差进行测距,由于激光脉冲发射具有高能量密度的特点,非常适合天文观察,地理探测方面的测量。
3.3测速激光传感器

测速激光传感器,通常利用多普勒效应来测量物体的速度。多普勒效应是当发射者和接收者之间的相对运动,会导致接收到的波的频率发生变化的现象。以汽车喇叭为例:当汽车以一定速度靠近听者时,听到的声音频率会增高,而当汽车远离时,听者会感觉到声音频率降低。

由于激光的高能量密度特性,它也可以用来测量流体速度。激光输出被分成两束,汇聚到被测物体或者流体粒子上,由于被测物的移动以及两束激光存在的夹角,其返回的散射激光具备不同的多普勒频移,再与到达探测器的初始本振激光做计算,即可算出移动速度。
4、激光传感器与其他传感器的比较

这是常用的几种传感器的特性比较,包括了激光,红外线,超声,激光四种传感器的各自特点。可以看到激光在多项比较中都有较好的表现,但是在成本方面是红外线和超声传感器比较有优势。
5、激光传感器的选型和购买
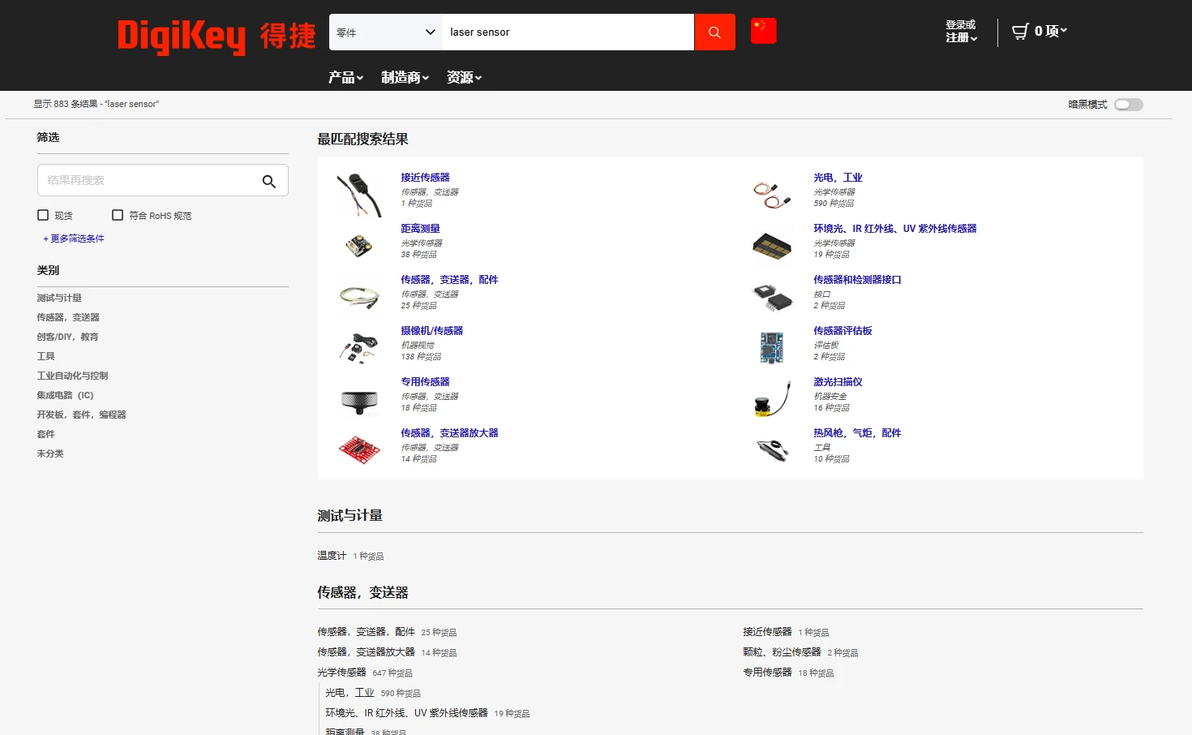
如果有购买传感器的需求,推荐去DigiKey搜索并购买,针对所需传感器都详细列出其工作原理、使用方法,购买途径等,非常方便。
我们到DigiKey首页上输入 “laser sensor”,可以看到,根据用途有不同的分类, 光电,工业类别下产品最多,有500多种,距离测量下有38种,摄像机/传感器下有138种,可以根据自己的需要进行细分查找。
完整的选型教程可以点击视频查看!
6、激光传感器实验演示
我们来演示使用 MCU 读取显示激光传感器的数据,实验中使用的是一款反射型TOF激光传感器。将手慢慢靠近传感器的上方,可以看到随着手的贴近,显示测量的物体距离数值不断减小,屏幕显示的距离示意光环也越来越接近圆心。
编程语言:MicroPython
编程软件:Thonny
主控芯片:RP2040
主控板卡:基于RP2040的带屏调试助手
完整的主程序代码,屏幕显示驱动和数据转换部分代码,可扫描二维码查看

激光传感器是我们常用的一种电子感知元器件。今天带大家了解了激光传感器的工作原理、使用方法、查找和购买途径,并演示了通过树莓派读取激光传感器的数据,大家也可以下载代码自行尝试一起学习。
