网站分类
搜索
最新留言
文章归档
友情链接
湖南科技大学于启凡:卫星激光测高产品定位精度初步验证与分析|《测绘学报》2025年54卷第2期
陆地生态系统碳监测卫星“句芒号”于2022年8月4日在太原卫星发射中心成功发射[1]。鉴于以往激光测高技术积累和测试经验[2-5],该卫星搭载的主载荷激光测高仪依旧采用大光斑线性体制的工作模式,结合多角度多光谱光学相机以主被动遥感相结合的方式来进行地表探测[6-7],相关数据产品可应用于森林植被高度反演、生物量估计、碳储量监测及地表高程测量等方面,为林业、测绘、气象等多个行业提供重要服务[8-9]。
几何定位精度是衡量卫星激光测高产品性能的一个重要指标。当激光光斑偏离其真实的地理位置时,将无法准确反映地物目标的高程信息。近年来,围绕卫星激光测高产品的定位精度,国内外学者相继开展了相关研究。文献[10—16]对星载激光雷达进行了较全面的分析,指出激光定位误差由硬件设备安装、姿轨测量精度、指向角及大气折射等所引起。文献[17—19]对激光测高载荷开展了几何检校研究,在标校激光定位后,有效提升了测高精度。文献[20]从观测条件角度出发,对资源三号02星激光数据在卫星侧摆、夜间升轨等不同模式下进行了质量评价,分析得出数据质量主要受限于卫星平台测量精度。文献[21]则评估了ICESat-2/ATL03数据产品版本3和版本4的定位精度,结果表明动态更新检校参数有助于提升激光数据质量。此外,该研究也注意到各波束的定位存在不同的时间行为。由于激光指向会随时间发生变化,激光测高仪的系统误差并非稳定不变[11];在昼夜不同观测条件下,太阳辐射、空间温度等环境因素也会引起测量平台结构出现热变形,导致激光定位呈现以轨道为周期的误差特性[22]。为了提升产品精度,在卫星发射后,通过开展激光雷达在轨定标试验来进行误差补偿。然而,在轨定标任务的工作量大、难度高,每年只有一次的定标作业无法长时序监视卫星在轨运行状态[23]。国内激光在轨定标工作为配合传统光学相机进行同平台检校,基本在白天开展,对夜间激光定位精度关注相对较少。因此,开展对国产卫星激光测高产品定位精度验证是非常必要的。
针对句芒号卫星激光测高产品定位,本文结合卫星激光载荷与足印相机固联的工作模式,通过星上足印光斑和地面高精度数字地表模型(digital surface model,DSM)数据对激光几何定位精度进行分析,验证激光光斑在长轨道周期内定位的稳定性,并探讨在昼夜观测条件下激光定位的误差特性。
1句芒号卫星激光测高仪及数据概述1.1句芒号卫星激光测高仪
句芒号卫星激光测量系统主要包括多波束激光雷达和足印相机。激光雷达用于测量星地距离并探测植被生态;足印相机则对激光波束照射到地面周围的地物进行成像,利用成像的足印光斑来反映激光发射状态。如图1所示,句芒号卫星激光测高仪发射5个激光波束,通过分光棱镜将激光出射波束的部分能量引入足印相机,实现监视激光光轴指向变化,同时将激光光斑信息与地表地物进行几何关联。
图1
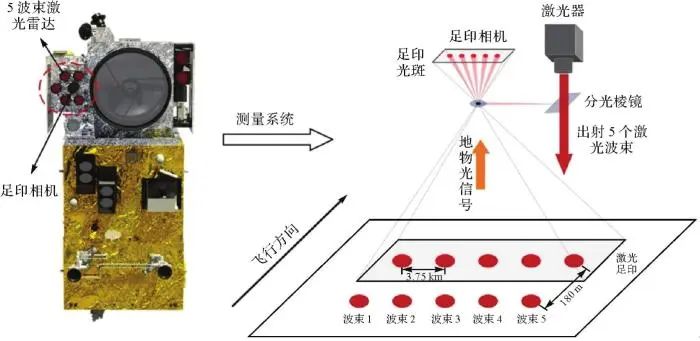
图1 句芒号卫星激光测量系统
Fig. 1 Gou Mang satellite laser measurement system
激光脉冲发射频率为40 Hz,沿轨采样间距约为180 m,相邻波束对应地面的激光足印在垂轨方向上的间距约为3.75 km。5个激光器同时工作,极大地提高了激光数据密集度和空间覆盖范围。涵盖5波束激光足印光斑的足印相机影像幅宽在像方上为2048×128像素,物方上约为16.4 km×1 km。主要技术指标见表1。
表1 多波束激光雷达主要技术指标
Tab. 1 Main technical indicators of multi-beam LiDAR
指标
设计值
轨道高度/km
506
激光波束数
波长/nm
1064
发射频率/Hz
40
采样频率/GHz
1.2
光斑直径/m
25
足印影像分辨率/m
新窗口打开| 下载CSV
1.2激光测高数据产品
句芒号卫星激光测高数据产品有激光数据(CASAL_A)和足印相机影像数据(CASAL_B)。CASAL_A数据分别为5个激光器提供经过大气校正、潮汐改正和精密定姿定轨等处理后的激光点位置和高程信息,数据分布如图2所示。CASAL_B数据则为激光的每次出射生成一个单独的观测文件,包括地物影像(B1)和光斑影像(B2)。地物影像为足印相机仅对地表地物成像的结果,光斑影像则为足印相机对激光光斑与地表地物同时成像的结果,如图3所示。地物影像与光斑影像在几何上完全一致,但由于曝光时长不同,地物影像背景要亮于光斑影像。
图2
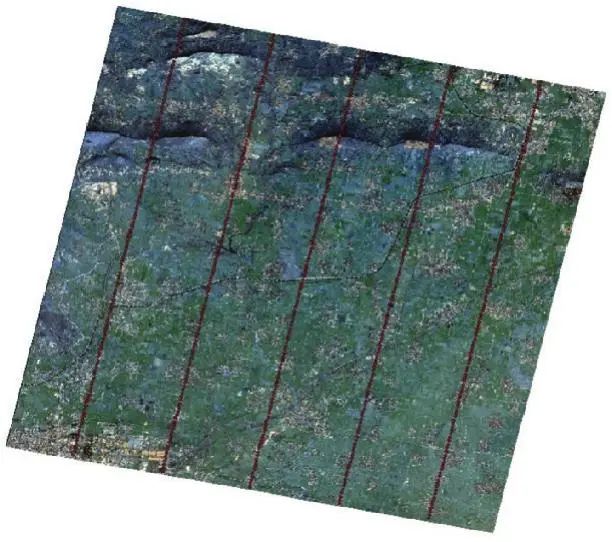
图2 激光数据分布
Fig. 2 Laser data distribution
图3

图3 句芒号卫星足印相机影像
Fig. 3 Footprint camera image of the Gou Mang satellite
2方法及原理2.1足印光斑中心提取
由于足印相机上的光斑受到地物和导光路投射的影响,光斑的能量分布会存在失真和偏差。传统的灰度质心法(gray centroid method,GCM)[24]和高斯拟合法(Gaussian fitting method,GFM)[25]主要用于确定光斑能量的质心,在提取光斑中心时对激光光斑能量分布变化比较敏感,而椭圆拟合算法[26]则是直接面向光斑形状的几何中心。为了确定激光光轴指向,宜采用光斑的几何中心。由于在足印相机上弥散的激光光斑呈现高斯分布,在光斑能量梯度变化最大处由噪声等因素引起边界点像素的识别误差最小。对此,本文提出一种基于光斑能量梯度最大的椭圆拟合方法(ellipse fitting method based on the maximum gradient of spot energy,MG-EFM),在初步确定光斑能量质心的前提下改进椭圆拟合算法,以获取高精度的足印光斑几何中心位置,算法基本原理如图4所示。
图4
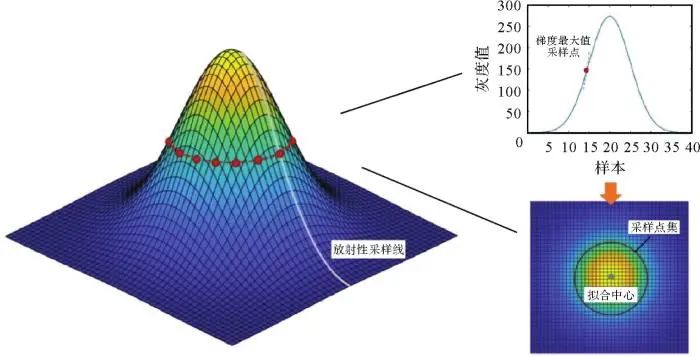
图4 基于光斑能量梯度最大的椭圆拟合方法原理
Fig. 4 The principle of MG-EFM
首先从足印影像中截取光斑区域,假设足印光斑影像的尺寸为M×N像素,每个像素的灰度值为F(xm,yn),采用GCM求解足印光斑的初始中心位置(x0,y0)
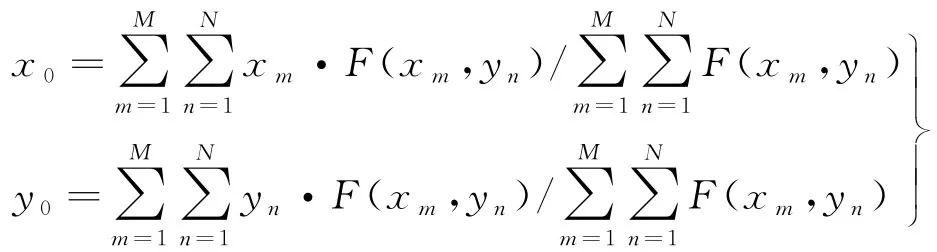
(1)
以初始中心向周围采样光斑影像放射线上像素的强度值,得到放射线上像素(x,y)处的强度集合F(x,y)。采用高斯函数模型对足印光斑能量强度分布进行拟合

(2)